- Hauptseite
-
JCLCTN-3 Roboterhubsäule: Technische Überprüfung und Integrationsleitfaden
Anzahl Durchsuchen:0 Autor:JIECANG Co., Ltd. veröffentlichen Zeit: 2026-01-31 Herkunft:https://www.jiecang.com/







JCLCTN-3 Roboterhubsäule: Technische Überprüfung und Integrationsleitfaden

Wichtige Erkenntnisse
Hohe Stabilität: Hält einem dynamischen Biegemoment von 200 Nm (statisch 300 Nm) stand, um ein Wackeln zu verhindern.
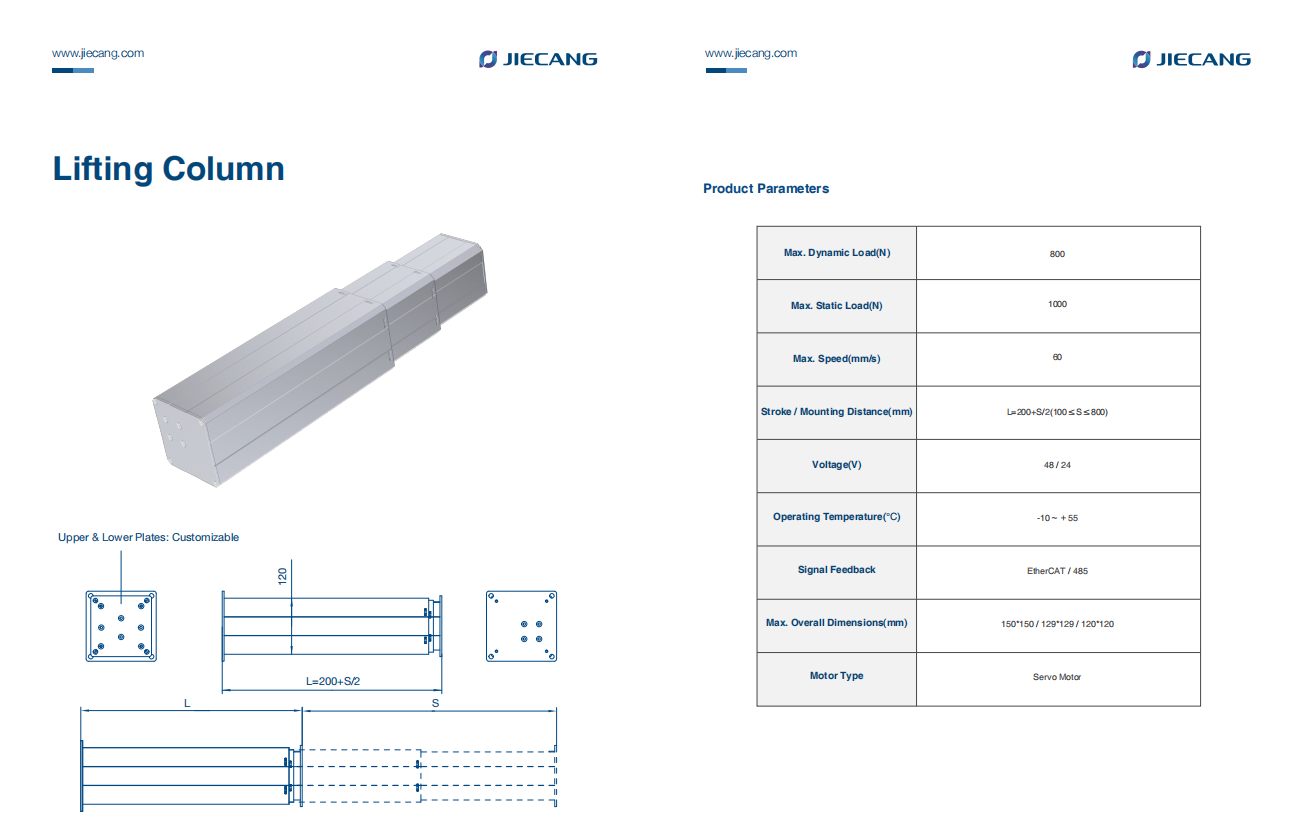
Kompaktes Design: 120 mm x 120 mm großes Profil mit integriertem internen Treiber.
Leistung: Maximale Geschwindigkeit 60 mm/s ; Maximale dynamische Belastung 800 N.
Intelligente Steuerung: Unterstützt EtherCAT und RS-485 für die Roboterkollaboration in Echtzeit.
Haltbarkeit: Funktioniert bei Temperaturen von -10 °C bis 55 °C.
Das „Rückgrat“ mobiler Roboter: Stabilitätsanalyse
Bei der Konstruktion autonomer mobiler Roboter (AMRs) bestimmt das Hebesystem die Reichweite und Stabilität des Roboters. Es geht nicht nur ums Heben; Es geht darum, die Nutzlast während der Bewegung stabil zu halten.
Der JIECANG JCLCTN-3 wurde entwickelt, um die kritische Herausforderung der „Seitenlaststabilität“ zu lösen . Im Gegensatz zu Standardaktuatoren ist er so konstruiert, dass er den seitlichen Kräften standhält, die entstehen, wenn ein Roboter beschleunigt oder stoppt.
Dynamisches Biegemoment: 200 Nm
Statisches Biegemoment: 300 Nm
Technische Auswirkungen: Diese hohe Biegemomentkapazität stellt sicher, dass oben montierte Module – wie kollaborative Roboterarme (Cobot) oder Präzisionssensorarrays – stabil und ohne Schwingungen bleiben, selbst wenn der AMR unebene Fabrikböden bewältigt.
Abmessungen und kompakte Integration
Raumeffizienz ist für die Konstruktion von Roboterchassis von entscheidender Bedeutung. Beim Einbau von Batterien, LiDAR und Recheneinheiten zählt jeder Millimeter. Der JCLCTN-3 verfügt über eine hochintegrierte Struktur, um den verfügbaren Platz zu maximieren.
Kundenspezifische Größen/Formen verfügbar
Antriebsintegration: Eingebauter Motor und Controller (kein externer Steuerkasten erforderlich).
Durch die Integration des Antriebssystems in die Säule reduziert der JCLCTN-3 den Verkabelungsaufwand und ermöglicht ein saubereres, kompakteres Roboterdesign.
Technische Daten
Nachfolgend finden Sie die verifizierten Leistungskennzahlen für den JCLCTN-3 , der für industrielle Automatisierungsstandards entwickelt wurde.
Intelligente Konnektivität und Langlebigkeit
Der JCLCTN-3 ist so konzipiert, dass er nahtlos mit dem „Gehirn“ (Robot Operating System) des Roboters interagiert.
Echtzeitsteuerung: Über EtherCAT oder RS-485 liefert die Säule Echtzeit-Feedback zu Position und Status und ermöglicht so eine Regelung im geschlossenen Regelkreis für komplexe, synchronisierte Aufgaben.
Anpassungsfähigkeit an alle Wetterbedingungen: Mit einem breiten Arbeitstemperaturbereich von -10 °C bis 55 °C eignet sich die Säule für verschiedene Umgebungen, von der Kühlkettenlogistik bis hin zu Patrouillenrobotern im Freien.

Nächste Schritte für Sie?
Sind Sie bereit, das JCLCTN-3 für Ihre Roboteranwendung zu validieren?
[Laden Sie die Kernantriebskomponenten von JIECANG Robotics herunter] https://www.jiecang.com/Lifting-Column-JCLCTN-3-pd550110748.html
[Kontaktieren Sie uns] https://www.jiecang.com/contactus.html
















